按先决条件制约的连锁(顺序) 控制电路1
在实际生产中,对装有多台电动机的生产机械,由于每台电动机所起作用的不同,有时需要按一定的先后顺序启动,才能符合生产工艺规程的要求,保证安全生产。如铣床工作台的进给电动机必须在主轴电动机已启动工作的条件下才能启动工作;自动加工设备必须在前一工步已完成,转换控制条件具备,方可进入新的工步;还有一些设备要求液压泵电动机首先启动,正常供液后,其他动力部件的驱动电动机方可启动工作。这种有先后顺序启动的电动机控制方式称为电动机的顺序控制或连锁控制。
两台电动机的顺序控制可以通过主电路连锁或控制电路连锁来实现。
通过控制电路连锁实现两台电动机的顺序控制
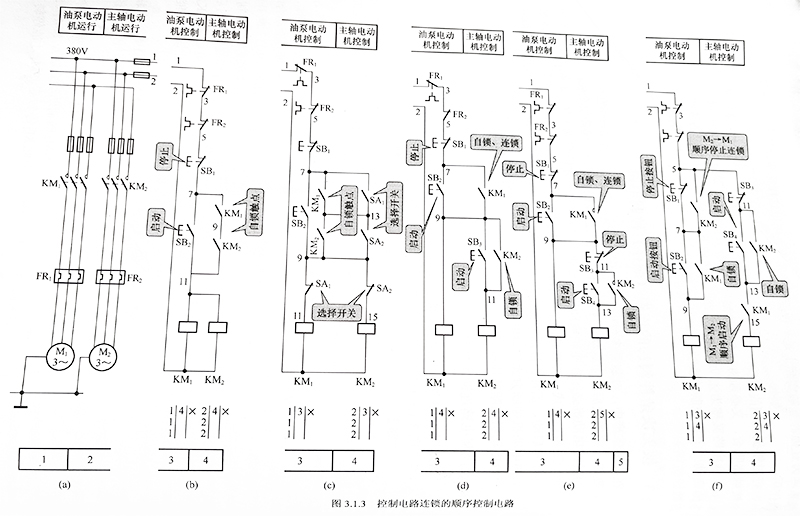
电路如图3.1.3所示,要求电动机M1启动后,才能启动电动机M2。其中图3.1.3 (a)为主电路,图3.1.3(b)~(i) 为控制电路。
【看图思路】
①对于图3.1.3(b)所电路,由于KM1、KM2的辅动合触点KM1(7-9)、KM2(9-11)串联后,与启动按钮SB2并联,因此能实现电动机M1和M2同时启动、同时停止的控制要求。
②对于图3.1.3(c)所示电路,该电路为在图3.1.3(b)电路基础上,增加了复合开关SA1、SA2。开关SA1和SA2的触点在图示状态下,图3.1.3(c)电路与图3.1.3(b)电路完全相同,能实现电动机M1和M2的同时启动、同时停止。若将SA2的动断触点SA2(9-15)断开而动合触点SA2(9-13)闭合,就是电动机M1的单独控制电路;将SA1的动断触点SA1(9-11)断开而动合触点SA1(7-13)闭合,就是电动机M2的单独控制电路。因此该电路还能实现单独控制。
③对于图3.1.3(d)所示电路,控制M2的KM2的线圈电路接在KM1线圈电路的启、停控制环节之后。这样,只有接触器KM1得电吸合并自锁后,满足KM2得电条件,KM2才能得电吸合,M2才能启动。按下SB1后,KM1和KM2同时失电释放,因此该电路能实现顺序启动、同时停止的控制要求。
④对于图3.1.3(e)所示电路,与图3.1.3(d)电路相比较,在KM2线圈电路串联有动断按钮SB3(9-11),因此该电路能实现顺序启动、M2先停止和M1、M2同时停止的控制要求。也就是M2工作,M1必须工作;M1停止,M2必须停止。
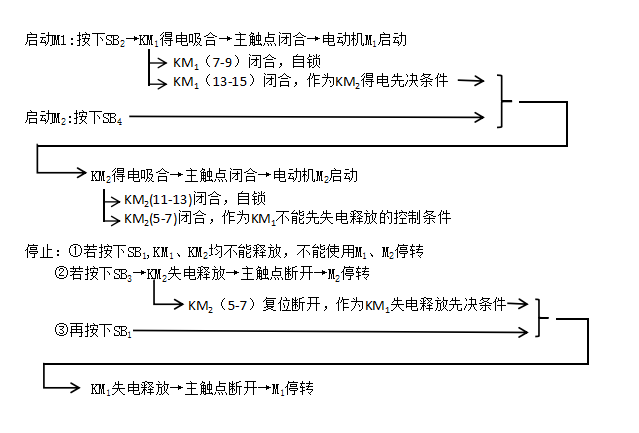
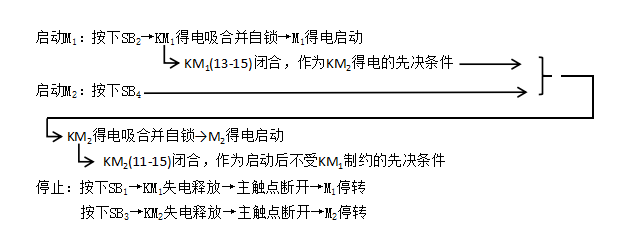
⑤对于图3.1.3(f)所电路,KM1的辅助动合触点KM1(13-15)作为先决条件串联在KM2线圈控制电路中,保证M1启动后M2才能启动。KM2的辅助动合触点 KM2(5-7)并联在动断按钮SB1两端,作为KM1失电的先决条件,因此M2停转后,M1才能停转。
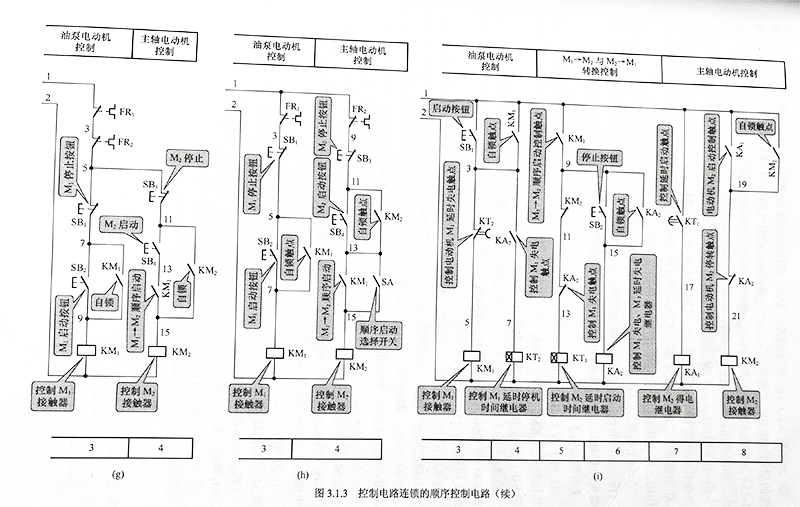
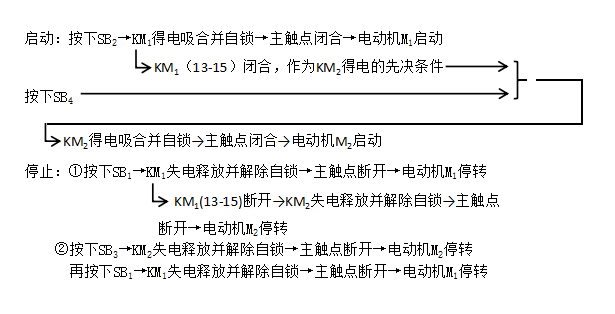
⑥对于图3.1.3(g)所示电路,KM1的辅助动合触点KM1(13-15)串联在KM2线圈电路的启动按钮SB4支路中,保证KM1启动后,KM2才能启动。KM2的辅助动合触点KM2(11-15)并联在SB4和KM1(13-15)串联电路两端,因此KM2得电吸合后,就不再受KM1制约。因此该电路能实现顺序启动、单独停止的控制要求。
⑦对于图3.1.3(h)所示电路,KM1的辅助动合触点KM1(13-15)作为KM2得电的先决条件串联在KM2线圈电路中,这样KM1得电后,KM2才能得电,实现电动机按M1→M2顺序启动的控制要求。在触点KM1(13-15)两端并联开关SA,该开关闭合,则失去连锁作用,两电动机可不受约束地任意启动和停止。
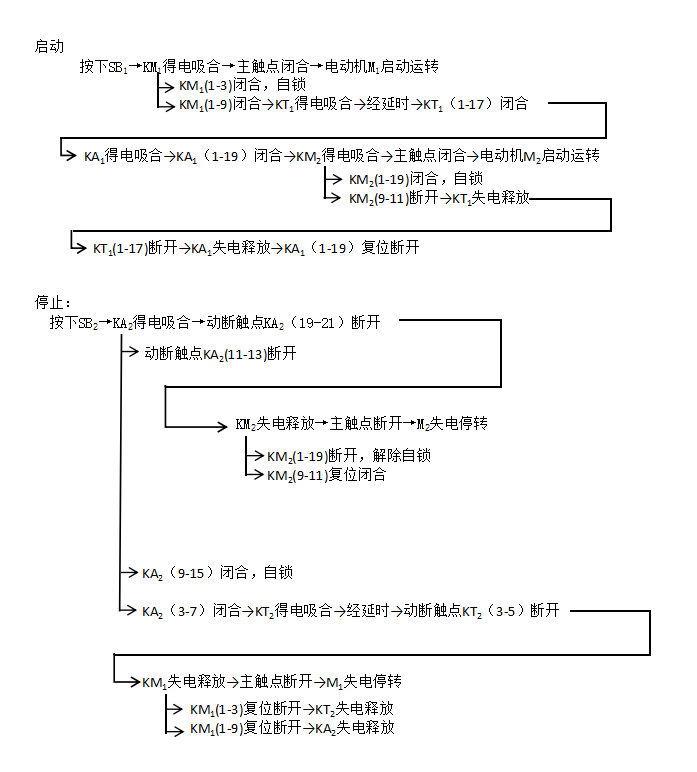
⑧对于图3.1.3 (i)所示电路,KM1通过KT1、KA1,使KM2延时得电吸合,从而实现两台电动机的延时顺序启动的控制要求。KA2控制KM2失电释放,并通过KT2,使KM1延时失电释放,从而实现两台电动机的延时逆序停止的控制要求。
【看图实践】
①对于图3.1.3(b)所电路,按下启动按钮SB2,KM1和KM2同时得电吸合,并过其辅助动合KM1(7-9)、KM2(9-11)自锁,电动机M1和M2同时启动运转;按下停止按钮SB1,KM1和KM2同时失电释放,电动机M1和M2同时停转。
②对于图3.1.3(c)所示电路,开关SA1、SA2在图示状态下,按下启动按钮SB2,接触器KM1和KM2同时得电吸合,电动机M1和M2同时启动运转;按下SB1,KM1和KM2同时失电释放,M1和M2同时停转。
若SA2闭合,其动断触点SA2(9-15)断开、动合触点SA2(13-9)闭合,并按下SB2,则KM1得电吸合并自锁,电动机M1启动运转;按下SB1,则KM1失电释放,电动机M1停转。
若SA1闭合,其动断触点SA1(9-11)断开、动合触点SA1(7-13)闭合;再按下SB2,则KM2得电吸合并自锁,电动机M2启动运转;按下SB1,则KM2失电释放,电动机M2停转。
③对于图3.1.3(d)所示电路,按下SB2,则KM1得电吸合并自锁,其主触点闭合,电动机M1启动运转,同时其辅助动合触点KM1(7-9)闭合,为KM2得电做准备,接着若按下SB3,则KM2得电吸合并自锁,电动机M2启动运转;按下SB1,则KM1和KM2同失电释放,电动机M1和M2同时停转。
④对于图3.1.3(e)所示电路,按下启动按钮SB2,KM1得电吸合,其主触点闭合,电动机M1启动运转,KM1的辅助动合触点KM1(7-9)闭合自锁,并使KM2得电工作条件满足;按下SB4,KM2得电吸合并自锁,电动机M2启动运转。停车时,若按下SB3,则KM2失电释放,M2停转;若按下SB1,则KM1、KM2均失电释放,M1和M2同时停转。
⑤对于图3.1.3(f)所示电路,电气元件动作顺序如下。
⑥对于3.1.3(g)所示电路,电器元件动作顺序如下。
⑦对于图3.1.3(h)所示电路,若开关SA未闭合,则电器元件动作顺序如下。
若开关SA闭合,则为KM1、KM2两个单独的控制电路。
⑧对于图3.1.3(i)所示电路,电器元件动作顺序如下。
【看图小结】
如果要求在甲接触器先得电以后,乙接触器才能得电(或不许得电),可将甲接触器的辅助动合(或动断)触点串接在乙接触器线圈的控制电路中,或者乙接触器线圈的电源接于甲接触器的自锁触点之后,反之亦然。这种逻辑关系同样适用于继电器。
如果启动时,要求在甲接触器得电以后,乙接触器才能得电;如果停止时,若甲接器失电后,乙接触器才能失电,则应将甲接触器的辅助动合触点串接在乙接触器的线圈申路中,并且在两端并联乙接触器的辅助动合触点,而若乙接触器失电后,甲接触器才能失电,将乙接触器的辅助动合触点并联在甲接触器线圈控制电路的停止按钮两端。这就是先决启动和先决停止电路。
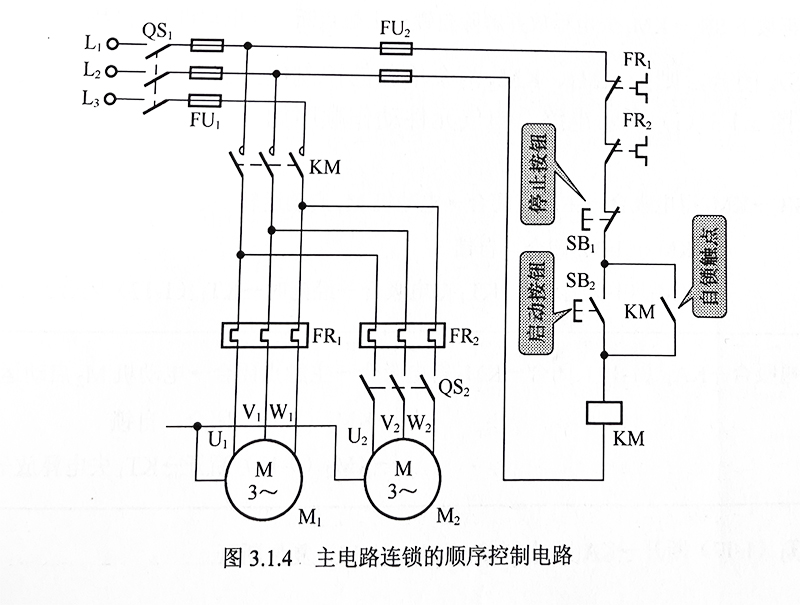
通过主电路连锁实现两台电动机的顺序控制
电路如图3.1.4所示,电动机M1由接触器KM控制,电动机M2由负荷开关QS2控制。
【看图思路】
在主电路中,电动机M2的主电路 (包括FR2和QS2)和电动机M1的热继电器FR1并联后,再与接触器KM的主触点串联,即将电动机M2支路串在接触器KM 主触点的下方。这样KM主触点闭合后,才能为电动机M2提供电源。
【看图实践】
按下启动按钮SB2,接触器主触点闭合,主轴电动机M1先行启动,并为冷却泵电动机M2提供电源,此后再合上负荷开关QS2,才能启动电动机M2。如果电动机M1不动作,也即接触器KM主触点不闭合,那么无论怎样操作负荷开关QS2,都不能使电动机M2先于电动机M1得电吸合。但必须注意:在两台电动机停车后,不能忘记断开负荷开关QS2,否则,在下次启动时会出现两台电动机M1和M2同时启动的情况。