互锁控制电路——接触器按钮正反转控制电路
生产实践中,很多设备需要两个相反的运行方向,例如主轴的正向转动或反向转动,机床工作台的前进或后退,起重机吊钩的上升或下降等,这就要求电动机能正、反向运行。三相异步电动机可借助正、反向接触器改变定子绕组电源相序来实现正、反向运行,电路如图3.1.2所示。


【看图思路】
正反转控制电路的主电路(图3.1.2(a))采用两只接触器KM1和KM2,分别控制电机M的正向运行和反向运行。这两只接触器主触点所接通的电源相序不同,接触器KM1按L1-L2-L3相序接线,接触器KM2则按L3-L2-L1 相序接线。这实质上是两个方向相反的单向运行控制电路的组合,由启动按钮SB2和KM1线圈等组成电动机M的正向运行控制电路,由启动按钮SB3与KM2线圈等组成电动机M的反向运行控制电路,如图3.1.2(b)所示。
由图3.1.2(b)可看出,当按下正转启动按钮,则KM1得电吸合并自锁,其主触点闭合,接通正转相序电源,电动机M正向运行。但此时如果按下反转启动按钮SB3,则KM2得电吸合,其主触点闭合,将接通反转相序电源。由于KM1和KM2同时得电吸合,它们的主触点同时闭合,将造成调相那两相 (L1、L3)短路。这样,需要反转时,必须先按下停止按钮SB1使电动机M停转,然后才能按反转启动按SB3使电动机反转启动。这样操作起来极不方便,而若直接操作反转启动按钮,则会发生两相短路故障,因此这种电路不能被采用。
为了防止误操作,保证每次只允许一只接触器得电吸合,而另一只接触器不能得电吸合,两只接触器间需要有一种互锁关系,互串对方接触器或复合启动按钮的动断触点。在KM2线圈电路中串接KM1的辅助动断触点或复合启动按钮SB2的动断触点,在KM1线圈电路中串接KM2的辅助动断触点或SB3的动断触点,如图3.1.2(c)、(d)、(e)所示。
【看图实践】
(1)对于图3.1.2 (c)所示电路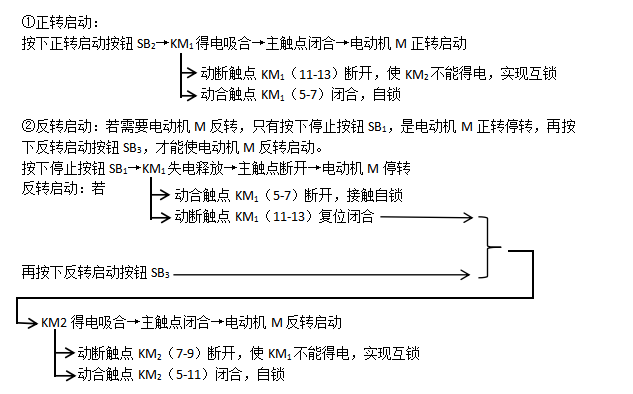
这种利用接触器的辅助动断触点的连锁称为电气连锁或接触器连锁,能有效防止由于误操作而引起的相间短路故障。但是,该电路只能实现“正→停→反”或“反→停→正”要使电动机由正转变为反转(或由反转变为正转),必须先按下停止按钮SB1后,才能再反向(或正向)启动,这样操作极不方便。
(2)对于图3.1.2(d)所示电路

此时要改变电动机的旋转方向,就不必再按停止按钮SB1,可直接操作正反转复合启动按钮SB2,、SB3,就能实现电动机的正、反转互换,给操作带来了方便。
这种利用复合按钮的动合、动断触点在电路中起相互制约的接法,称为机械连锁或按钮连锁。该电路能实现“正→反→停”或“反→正→停”控制。
复合按钮具有连锁功能,但工作不可靠,因为在实际使用中,由于短路或大电流的长期作用,接触器主触点可能会被强烈的电弧“烧焊”在一起,或者当接触器的机构失灵,使主触点不能断开,这时若另一接触器动作,将会造成电源短路事故。如果采用接触器的动断触点进行连锁,则不论什么原因,当一个接触器处于吸合状态,它的连锁动断触点必将另一接触器的线圈电路切断,从而避免事故的发生。
若把两种连锁结合起来,就可能解决上述的不足。把同时具有电气、机械双重连锁控制的电路,称为复合连锁控制电路,如图3.1.2 (e)所示,它既能实现“正→停→反→停)控制,又能实现“正→反→停”控制。这种控制线路兼有接触器连锁和按钮连锁的优点,操作方便、安全可靠且反转迅速,因此应用甚广。
(3)对于图3.1.2(e)所示电路

【看图小结】
若要求甲、乙两只接触器不能同时接通,可在其线圈前互串对方的辅助动断触点,即在乙接触器线圈前串接甲接触器的辅助动断触点,在甲接触器线圈前串接乙接触器的辅助动断触点,这样可保证每次最多只能有一只接触器得电,而另一只则不能得电,这种逻辑关系称为互锁。互锁实际上是一种连锁关系,之所以这样称谓,是为了强调触点之间的互锁作用。
有时根据控制的需要,将若干个接触器作为一组,在同一组中的接触器同时只准许一个接触器吸合,又必须将其余的接触器锁定在释放状态,这就要用到互锁电路。
互锁电路又称为先动作优先电路,即先按下的启动开关所控制的接触器吸合,而后按下的启动开关所控制的接触器被锁定在释放状态。若同时按下两个启动开关,则动作快者有效。